
Eric Schwarm
Mechanical Design for Robotics

I am a mechanical design engineer for robotics and aerospace.
Currently, I work for Flightwave Aerospace, a Red Cat Holdings company (nyse: RCAT). My primary responsibilities are a technical lead for new camera gimbal payloads, a new aircraft platform, and developing institutional knowledge and processes while we have scaled from 12 employees to over 80. Aerospace has been a nice application of my robotics expertise within the context of my extracurricular aero experience of sailing, kitesurfing and riding hydrofoils.
I completed my PhD at Northeastern University. My dissertation work is a hydraulic teleoperation manipulator platform for haptic telemanipulation. The work during my PhD focused on the development of low-friction, lightweight hydrostatic transmission systems and mechanisms for robotics applications.
I received my master’s degree is from University of Miami where I focused on composites and fracture mechanics. My master’s thesis was 3D FEA simulation of composite delamination due to fatigue damage.
I attended Roger Williams University in Rhode Island for my undergraduate degree where I was on the top-ranked, national championship winning sailing team. I learned a lot about what goes into a consistent winning team. College sailing is unique in that it is a coed, full-year sport.
In my free time, I enjoy kitesurfing, sailing, as well as more engineering related projects using composites, 3d printing, and carpentry for boat maintenance and custom kiteboarding and foiling equipment.

Flightwave, a Red Cat Company
Technical lead for an ultralight fixed-wing VTOL drone, featuring thrust vectored control and interchangeable payloads
When I joined Flightwave, the product was in a prototype state, being produced by the engineers who designed it. Production has scaled from 50 to 500 units per year.
In parallel, new products are under development to address the production challenges and the transition of customer demographic from research to defense
I have been able to apply my robotics experience within the context of my extracurricular passions of sailing, kitesurfing, and hydrofoiling. The drone structures and mechanical systems are at a similar scale to the robotics systems I have developed, making the transition easy and allowing me to make an immediate impact.
My projects have not been released yet, they will be discussed here once released.

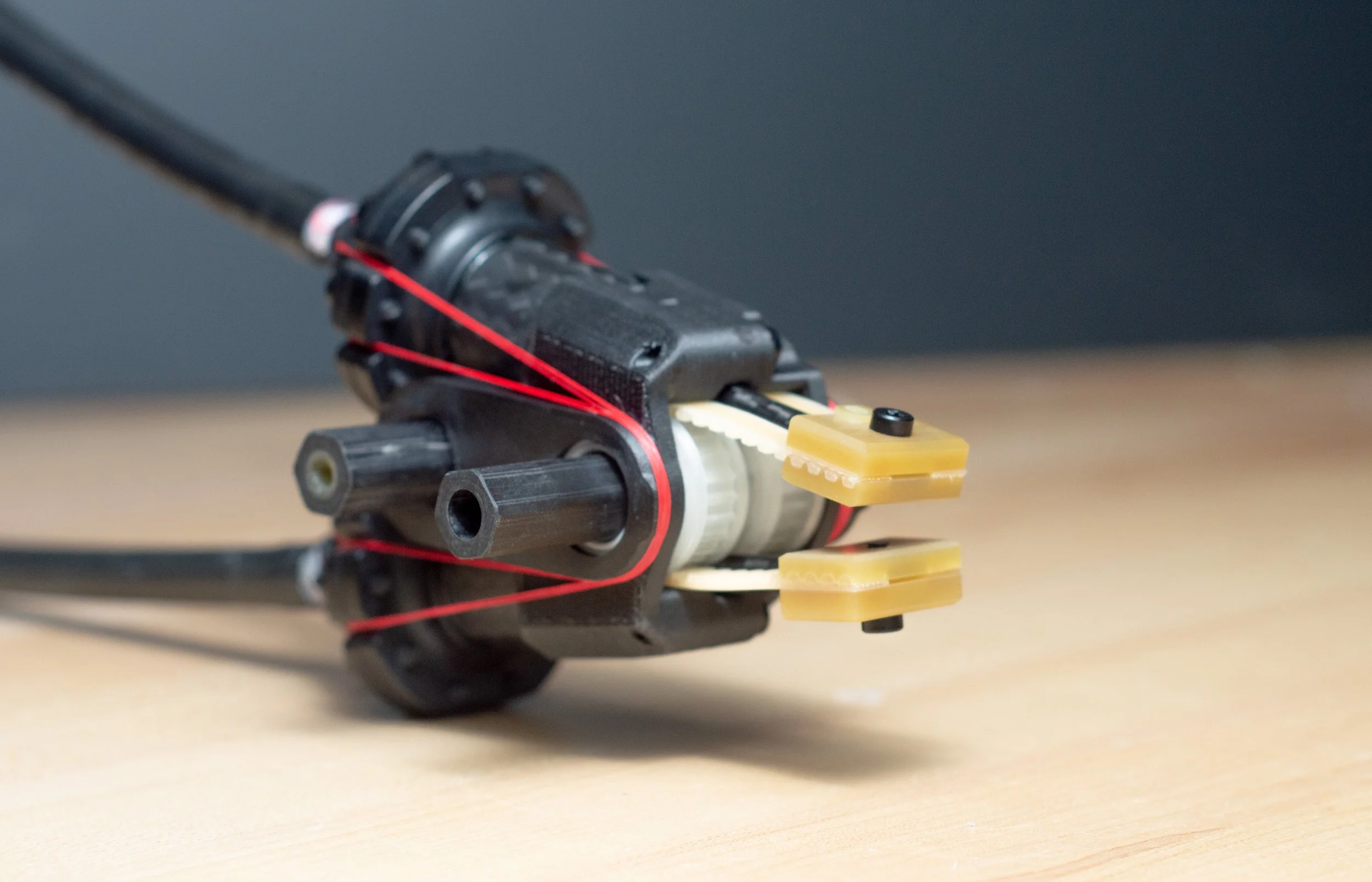
Hydrostatic Gripper for Low-Impedance Haptic Manipulation
This is the first project of my PhD research and has been used regularly since to conduct controls research in our lab, as well as for the key component of our Xprize avatar competition robot.
It is a 2 DOF hydrostatic gripper capable of haptic quality force feedback. The two fingers are coaxial, so each finger can have an individual actuator while achieving wrist rotation and grip opening. The gripper weighs 220g and has a grasp force slightly stronger than a human. The design goal was to make a low friction, haptic gripper for use on a commercial manipulator for conducting manipulation tasks requiring a sense of touch rather than just precise position control.
A great example of this is scooping up a piece of fish from a table; traditional grippers struggle to use contact with the table to scoop up an object.
The low-impedance of the fingers allows for very light, quick motion allows for dynamic performance such as catch a thrown object.


Examples of alternative fingers which can be easily swapped in


Above, the low impedance transmission allows for the finger to be pressed against the surface, allowing it to scoop up a piece of raw fish. It is also fast enough to catch objects while teleoperated.
Below, a demonstration of the grip force (orange) while grasping memory foam and elastic foam. the curvature shows the relaxing of the memory foam of different densities and how it compares to the elastic foam.





Nonmetallic Hydrostatic Actuators
Nonmetallic actuators can be cheaply manufactured, resulting in widespread adoption of robotic systems, as well as use in corrosive or hazardous environments like nuclear disasters or underwater
Tensegrity Rotary Actuator
The geometry is designed to optimize load paths and allow the use of kevlar thread to take the tensile loads instead of bulking up parts and using more bolts. The plastic parts are better in compression, and the fiber wrap keeps them from taking tensile loads.
This actuator is being used to create a manipulator for an underwater ROV, for remote teleoperation and is funded by the US Navy.
I have developed a shaft and clamping system, using carbon fiber shafts I milled into a rounded hex profile for good torque transfer and clamping, while still allowing the use of standard bearings.



The entire actuator can be 3d printed or injection molded to bring down cost to under $100 each
Two of these actuators are combined to create a hydrostatic transmission that is extremely low friction and high torque density
A significant advantage of these actuators is the ability to remove the actuation power source, typically a large direct drive motor, from the mechanism or manipulator. This allows the mass and size of the motor to no longer be a constraint or negatively impact the mechanism


The modularity of these actuators allows them to be easily assembled and reconfigured for a haptic, low-impedance wrist or other system. The actuators can be hydrostatic with a hydraulic preload for stiffer bidirectional torque transmission as well as use underwater.
The rex shafts and clamps allows for indexed parts, so you always know components are aligned. The positive engagement of the rex profile eliminated the slipping of a round shaft.


XPrize ANA Avatar Challenge Finals
Team Northeastern placed 3rd at the finals competition testing. A wireless robotic avatar was developed using the same concept we used for semifinals testing. Competition tasks included using a drill, social interaction, navigation, pick and evaluate and place, and using haptics to select a rough rock.

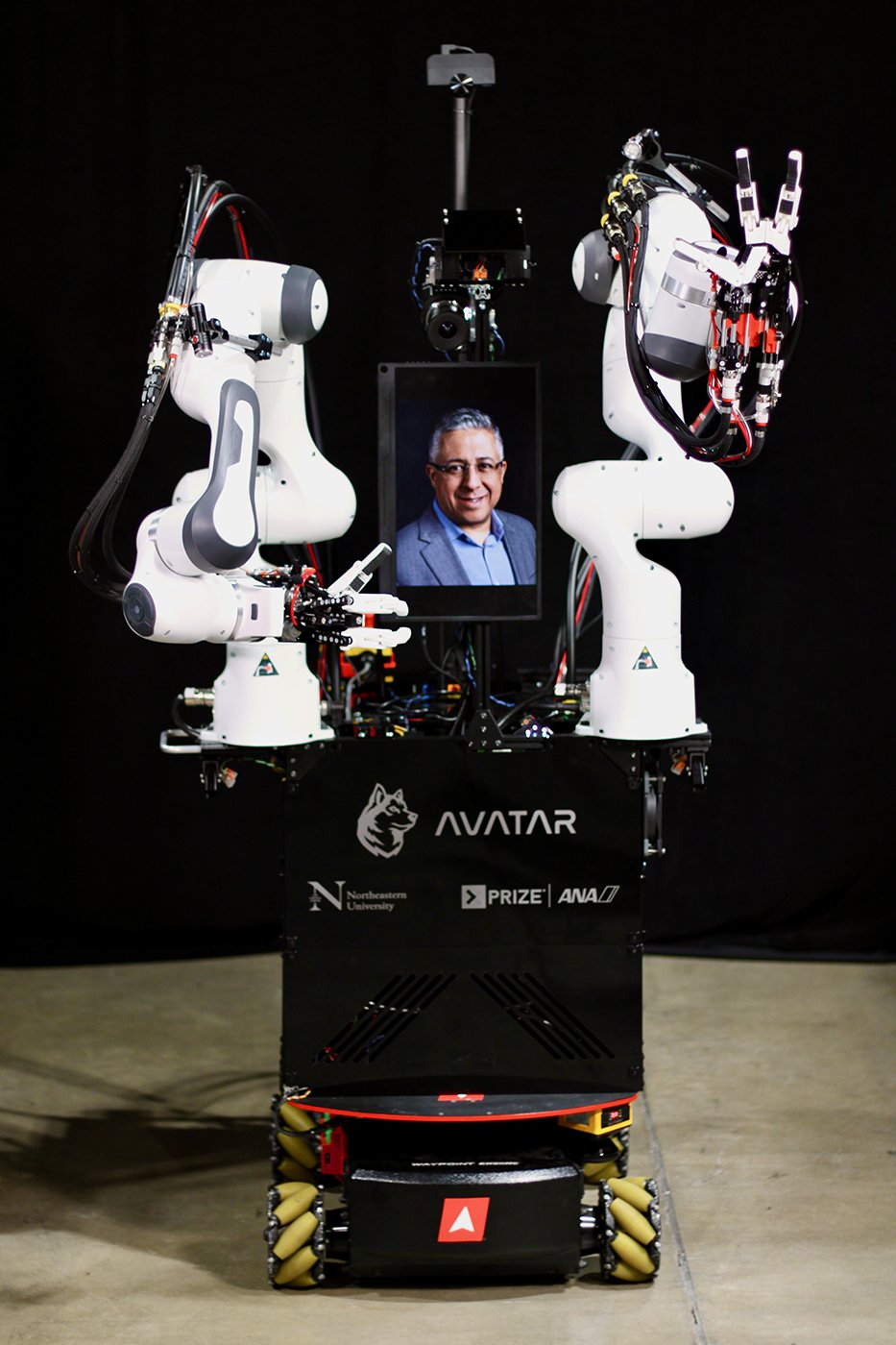


I guided development of the user interface. I created the concepts for user interfaces of both systems including the physical interfaces, driving interfaces, and display configurations. Balancing ease of use, ergonomics, and performance capability was a challenge.





XPrize ANA Avatar Challenge Semifinals
We placed third in the semifinals as well, performing the tasks much faster than most teams with our very intuitive and simple yet capable system. Our team of six PhD students worked very hard to pull the system together in the weeks leading up to the competition. We had no idea what the competitors would be like, making it difficult to make design decisions.
We repurposed the gripper I had developed for use in the competition as a haptic teleoperation system. A second gripper was modified to be a user interface. I designed the input arm which used encoders to control the UR5, as well as the counterbalance system. Integrating all of the systems into one, fitting all the motors and power electronics together and within the requirements of the competition was a challenge.
The crew working the event was excited to try our system, and stayed late after the competition to demo it.
I used my years of coaching experience to inform user interface design decisions as well as conduct training of system operators, which had to perform tasks using the system after just one hour of training.





Manipulator for Low-Impedance, Haptic Manipulation

The target was to develop a platform for haptic manipulation research, in the lab and deep underwater. I developed nonmetallic hydraulic actuators, more about them below, which I used for this actuator. The wrist of the manipulator is modular, allowing reconfiguration for a desired task or based on user preference. The total moving mass of the manipulator is 1.13 Kg, 600g of which is the wrist. The payload of the manipulator is a minimum of 2 Kg. The goal of the design is to feel and use interaction forces to aid manipulation and perform tasks in a natural, compliant manor.
It uses a novel shoulder mechanism to locate the two shoulder degrees of freedom on the mechanical ground, and the elbow actuator grounded to the shoulder pan actuation.
The novel forearm is at an angle of 30 degrees to move the shoulder and elbow away from the line of sight of an operator or vision system on a mobile robot.

The shoulder mechanism is modular, and can be driven by hydraulic actuators or, as seen here, direct drive motors with two stage gear reduction. These gearboxes have a total of a 6:1 ratio for sufficient torque, minimal inertia and backdrive force. Their simple, elegant design allows for the two belts of each gearbox to be tensioned simultaneously and equally.

The arm uses four bar linkages move actuators proximally. The wrist tilt actuator is replaced by two four bar linkages which keep the base of the wrist at a prescribed angle. The modularity of the wrist allows this to be replaced with an actively controlled actuator.


The manipulator is driven by motor-actuator coupled units, assembled into a drive unit. The motors are direct drive DC motors. They are frameless and sealed, with a sealed magnetic encoder for use underwater. The larger actuator requires a 3:1 belt reduction for sufficient torque.

Actuators use a hydrostatic force transmission to locate large, heavy direct drive motors, capable of rendering a wide range of impedances, in the base and not in the moving parts of the manipulator. The hydraulic hose routing was taken into consideration from the initial design stages. The hydraulic actuators are modular, and could easily be replace by electromechanical actuators.






The routing of hydraulic hoses was kept in mind while designing the shoulder and elbow linkages. The clear path for the hydraulic hoses allows them to be added or removed when reconfiguring the wrist actuators.



Other Projects
In addition to those primary projects, I have worked on a few other minor projects that did not get as far along due to prioritization of projects.



Linear Hydraulic Actuator Arm, 2019
I designed an arm using the same linear actuator as I used in the gripper and a new larger version.
The elbow mechanism is a linkage-differential I came up with. The linkage uses the larger, more powerful actuator for elbow flexion and extension. The wrist roll is achieved using the bevel gears and the smaller actuator. Since the moment arm for the wrist is significantly less, we use the smaller, weaker actuator.



Flying Bonnet, Fiber Hinge Actuator, 2019
In experimenting with different approaches to designing actuators using rolling diaphragm, I designed and prototyped an entirely 3d printed and kevlar thread actuator.
The actuator has the outer parts move and rotate an irregularly shaped pulley. Instead of bearings, the rotation is restrained by a kevlar threaded hinge. The output it connected directly to the flange of the pulley.
Ultimately we decided the approach was not further persuing and we put our efforts towardsother projectes rather that iterate and make the actuator more robust
Master’s Research: FEA Simulation of Fracture in Composite Parts
Used custom adhesive elements to represent damage accumulation in an adhesive bond to simulate degradation of the interlaminar cohesive bond within a composite part. This is then used to simulate the failure and behavior through failure of a part


Crack propagation from a initial delamination in the corner of a carbon fiber bracket due to cyclic loading
Composites Design and Manufacturing






Undergraduate Senior Design Capstone Project: Adjustable, disassemble-able, Carbon Fiber Bicycle.
The concept was a a bike frame that could be adjusted for riders from 5’2 to 6’2 by adjusting the length of the frame in addition to the usual adjustments. The frame can be disassembled to fit within the dimensions of the wheels, allowing it to be shipped or transported in a box. The removal of the downtube makes it very comfortable carrying up and down stairs. As with most undergraduate capstone projects, it is overbuilt. it came out to around 23lbs and shocking stiff, making handling lively and accelerations noticeably more direct.
Worked with IYRS Composites Tech School for manufacturing guidance and access to facilities. Initially planned on coordinating with their students as a form of engineer-manufacturer collaboration. I produced the prototype myself, with the help of IYRS to produce the molds.
Other:
Composite Parts for Kiteboarding and Sailing Equipment.
Composites Structure Design for hydrofoil boards and surfboards, fabrication of 5




Coaching Experience
I was a sailing coach for 9 years where I developed coaching and communication skills which have proved useful beyond teaching sailing. The ability to take something as technically complex and explain it to children, adults, and different types of thinkers has been useful when communicating my ideas to interdisciplinary teams.
The practice of coaching, the repeated process of instruction and observation, of someone was very useful for projects like Avatar. Years of observing how people interact with a complex, often overwhelming and intimidating system was very helpful in informing design decisions and crucial for how to train judges and operators to use our system. Coaching children is a great way to learn how to teach and communicate since they give great feedback where adults often pretend they understood. After teaching both children and adults, I firmly believe that working with adults does not help you develop communication skills the way working with children does.
These skills are also useful while communicating on interdisciplinary teams, where everyone has different technical backgrounds.
Teamwork Experience
As a competitive sailor from childhood up through college, I was on coed teams through the whole experience. In college, my team was ranked first in the nation for over the year, winning countless events including a national team race championship. The culture of a winning and successful team is unique, and something that can be cultivated in every type of team.
On a collegiate sailing team, you are competitive with each other for slots at events, while simultaneously coaching each other. At events, you rely on your teammates to be successful for you to be successful. This competitive drive to improve while helping everyone around you also improve is another important mentality for successful teams to have.
Competitve sailing events are a series of races, where you must reflect and make adjustments between races. The weather is constantly changings, and the competition makes different choices each race, making each race unique. Being able to analyze each race, reflecting on your decisions and recognizing patterns that you can apply to the next race. This habit of constant self coaching and adapting is key to learning and growing rather than staying stuck in your ways.
Extracurriculars


Outside of engineering, I spend my time kiteboarding and wingfoiling around New England. I spend the summers sailing around Maine and Boston Harbor on the boat I fixed up during the covid lockdown. During the winter, I am often skiing in Maine and Vermont. I enjoy car camping road trips in new regions.




Current and Future Work Interests
I am to continuing work on manipulation systems with compliant actuation and rigid precision for applications like physical human-robot interaction and controls research in the form of grippers, wrists and arms
Further Development of Avatar Subsystems and Components such as:
Human - Robot Interfaces for Robot Control or Virtual Interaction
Teleoperation/ Telemanipulation Systems for Training Autonomous Robot systems
Human Simulator Interfaces for Training in Virtual Environment
High Performance Robot Components and Mechanisms such as:
Robots for physical human robot interaction
Lightweight, Haptic Robot Systems and Mechanisms for Manipulation and Interacting with Unknown Environment in a Compliant yet Precise way
Low-Impedance (primarily low friction and stiff) Dexterous Robotic Hands
Manipulators
Cable Driven Systems, Multi-DOF Parallel Mechanisms, and Integrated, Low-Friction Hydraulic Systems
Composites Manufacturing using Rapid Prototyping Methods
In General,
I’m looking to create elegant mechanical systems to solve complex and unique problems.